Understanding vessel-mounted current measurement
- Nortek Wiki
1. The basics of vessel-mounted current measurement
Currents along coasts and in river estuaries are frequently complex, varying in space and time depending on the tide, wind, atmospheric pressure and the impact of man-made structures and natural formations. The accurate measurement of their speed and direction using ADCPs is crucial for our understanding of beach erosion, transport of biological materials or suspended sediments, forces acting on marine structures, and safe navigation of vessels.
Vessel-mounted ADCPs enable industry professionals to gather this critical information over a large spatial and temporal range, gathering a more complete picture of the currents in these dynamic areas than would be captured by a stationary ADCP.
The data from vessel-mounted ADCP surveys are used by a variety of professionals. For example, port authorities use current profiling to draw up detailed maps of currents during different phases of the tide to enable vessels to enter and leave harbor safely. Additionally, dredging and marine construction firms need accurate current profiling to assess sediment transport or perform their subsea operations effectively. Tidal energy firms also benefit from detailed current profiles to ensure their turbines are located on the optimal site to take advantage of current flows. Vessel-mounted ADCPs open doors for all of these groups and more by offering flexible and extensive current measurement.
1.1 How do vessel-mounted ADCPs work?
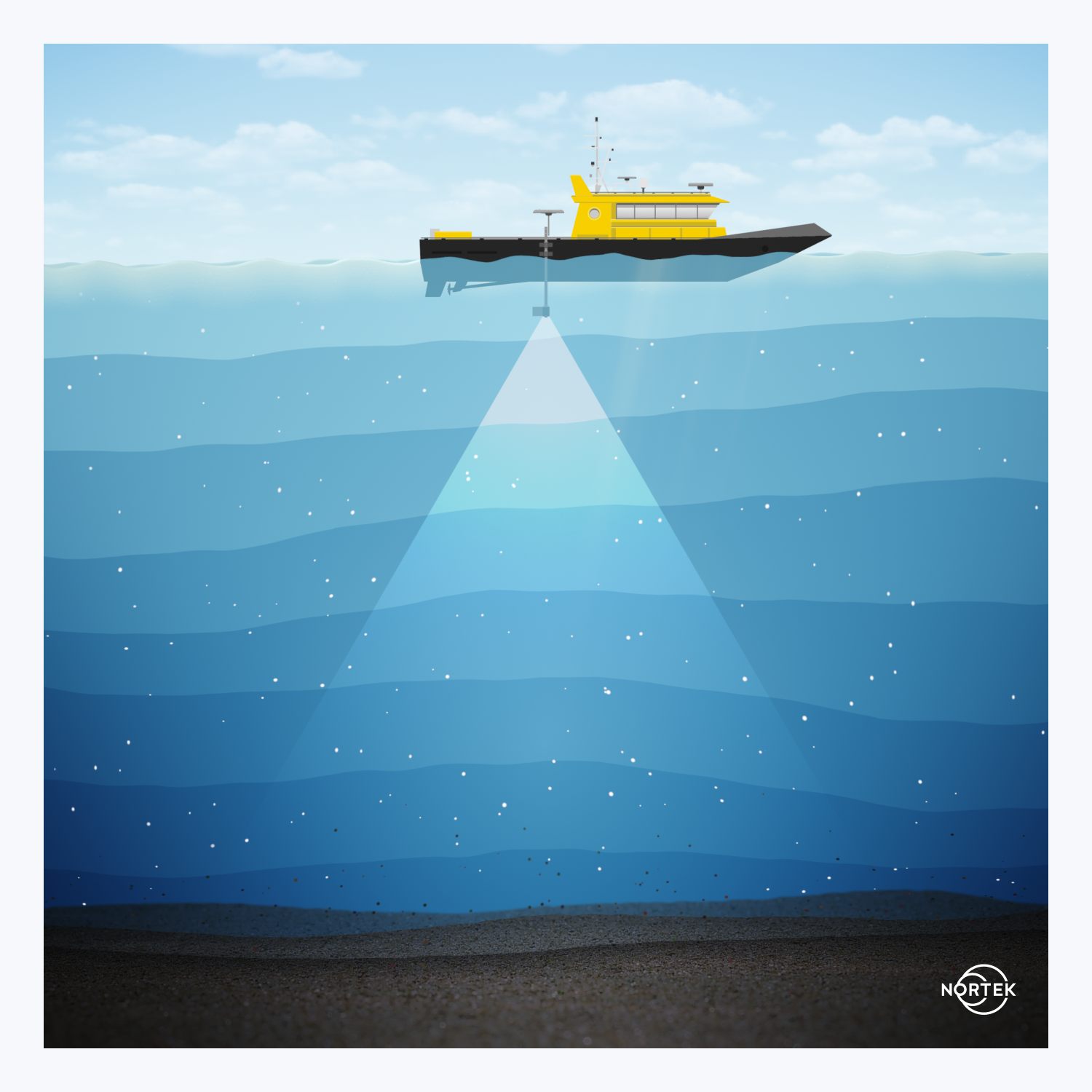
ADCPs measure water movement by interpreting sound waves (“pings”) transmitted by the instrument and subsequently reflected back to the instrument from particles in the water, such as sediment, plankton or other small particles. They rely on the Doppler effect to determine the speed and direction of those passively moving particles, or “scatterers,” thereby determining the speed and direction of the currents as well.
Read more about the principles behind ADCPs in our complete guide.
A vessel-mounted ADCP relies on the same principles as a stationary ADCP, producing a profile of the currents between the vessel and the seabed.
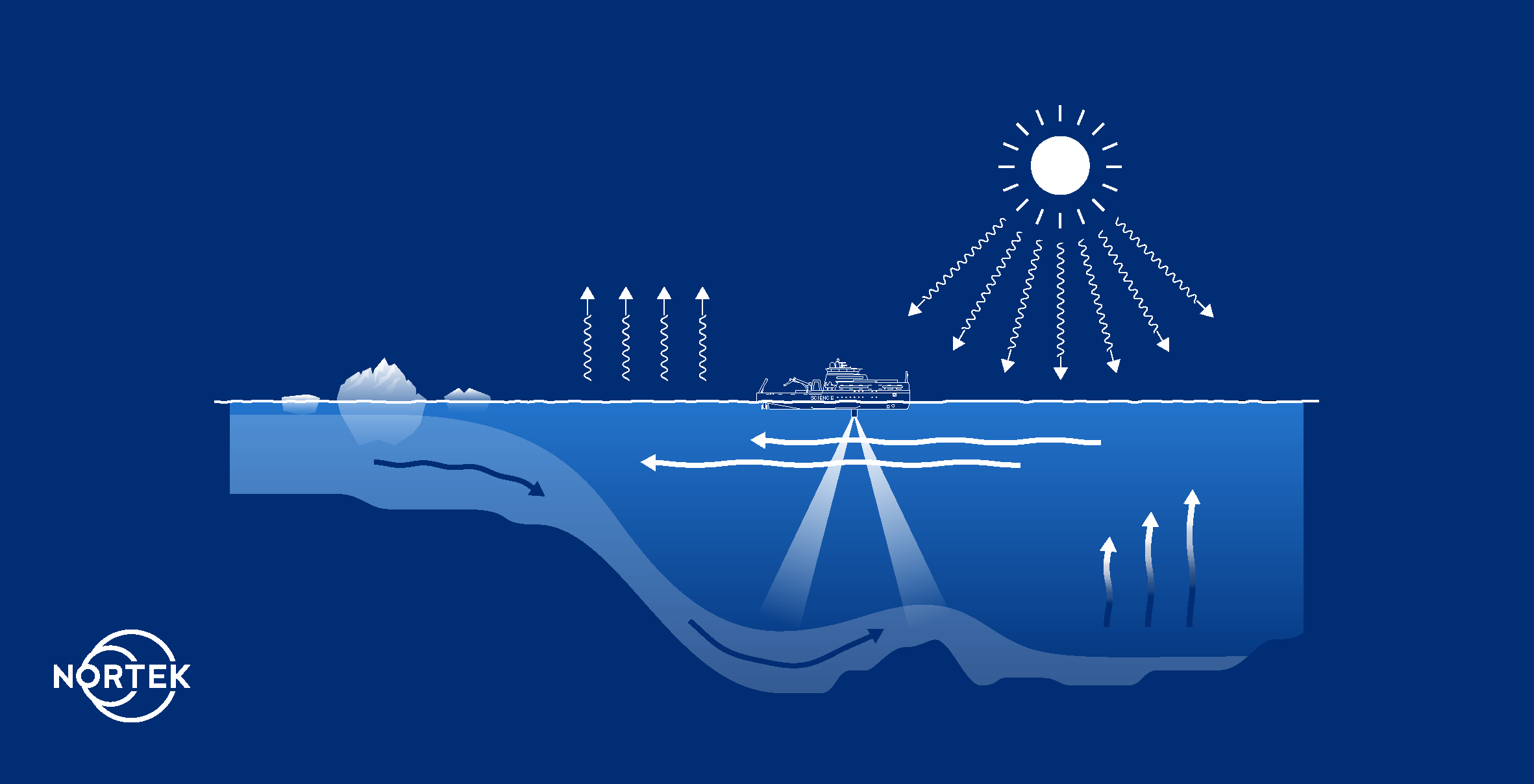
However, vessel-mounted ADCPs encounter an extra layer of complication while measuring, because the vessel on which they are mounted is moving. This means the ADCP will have to account for the speed and direction of the vessel when determining the velocity of the currents beneath it. Thankfully, an ADCP can also calculate the speed of the vessel over the seabed, using a technique called “bottom tracking.” To perform bottom tracking, the ADCP measures the Doppler shift of a ping that bounces off the seabed, rather than scatterers in the water like with current measurements. This effectively measures the speed of the vessel relative to the sea floor.
While bottom tracking is the most accurate way to determine the ship’s speed, there may be cases where the bottom is out of range of what the ADCP can measure. An external position source such as GNSS acts as a redundant vessel velocity source, enabling correction for vessel speed even in cases where bottom tracking is unavailable.
The vessel will also be pitching and rolling on the water surface, meaning the ADCP will be as well. There are a few methods to correct for this motion. One way is by using an internal AHRS in the ADCP. The AHRS detects the heading, acceleration and tilt of the ADCP. With this information on hand, this pitch and roll motion can also be accounted for in calculating current speed and direction.
The ADCP and associated vessel-mounted software can very accurately account for the velocity, pitch and roll of the vessel when calculating current speed and direction.
Vessel-mounted ADCPs enable a single ship to accurately measure currents over a large area in a matter of minutes.
1.2 What types of data can you collect from a vessel-mounted ADCP?
Current profiles: The main goal of most vessel-mounted ADCP surveys is to collect current profiles. The ADCP measures the speed and direction of currents at multiple depths from the vessel to the seabed. The number of cells (i.e., depth layers) is determined by the frequency of the ADCP and how the user has set up the instrument.
The beauty of a vessel-mounted survey is the ability to take multiple current profile measurements at different points across a sailed track. This can show users how the currents vary not only with depth, but across geographic space


Sediment or biomass estimates: Some ADCPs have an option for an echosounder mode or a built-in scientific echosounder. Using a vessel-mounted ADCP with echosounder capability enables the collection of echograms over a larger spatial area. This data can provide information on sediment concentrations or transport, or on the presence and density of biomass such as krill or schools of fish.
River discharge: River discharge is the result of the mean velocity multiplied by wetted area. It is a measurement of the amount of water flowing through a river channel. By measuring multiple transects and taking average measurements, vessel-mounted ADCP users are able to use tools like QRev to calculate river discharge from their vessel-mounted ADCP data. We discuss QRev in section 3.
1.3 Advantages of vessel-mounted current measurement
Vessel-mounted ADCPs are an important tool for many marine researchers. Once an ADCP system is installed on a vessel, it takes considerably less time to run a vessel-mounted survey than to deploy a traditional stationary ADCP. They also don’t require the time-consuming and potentially costly construction of infrastructure to hold a stationary ADCP, and avoid the risk of damage or loss inherently posed by leaving ADCPs out for long periods of time.
One of the biggest advantages of using a vessel-mounted ADCP is the ability to take measurements at more than one time or in more than one place. For example, a device mounted on a vessel can be taken to the middle of a river to measure currents during periods of high and low water discharge, gathering a complete picture of the currents both all the way across the river as well as during different events.
In a port, you may want measurements at several locations along a route where large ships are experiencing difficulties navigating to check how large-scale current patterns vary. In a coastal inlet, you may want to check out how currents between two islands behave as the tide changes. Vessel-mounted ADCPs enable these studies in ways that stationary ADCPs would not.
Finally, vessel mounting is indispensable if you want to measure currents over an entire area, rather than a few discrete places. Vessel-mounted ADCPs allow you to compile a detailed 3D map of currents across a zone.


1.4 Technical considerations for vessel-mounted measurements
Water depth: Modern ADCPs can generally profile up to 1000m. Lower-frequency ADCPs can profile longer ranges, but usually don’t offer as high of resolution, single ping precision, or ping rate. These parameters are major factors in final data quality, especially when taking vessel-mounted measurements. Stationary ADCPs have the advantage of measuring in one spot for a long period of time, and benefit from the ability to average multiple measurements for better accuracy. VM ADCPs only get to take measurements at a certain place for a short moment; the precision of that measurement is crucial. Therefore, choosing an ADCP of appropriate frequency for your target profiling range (i.e. water depth) is very important.
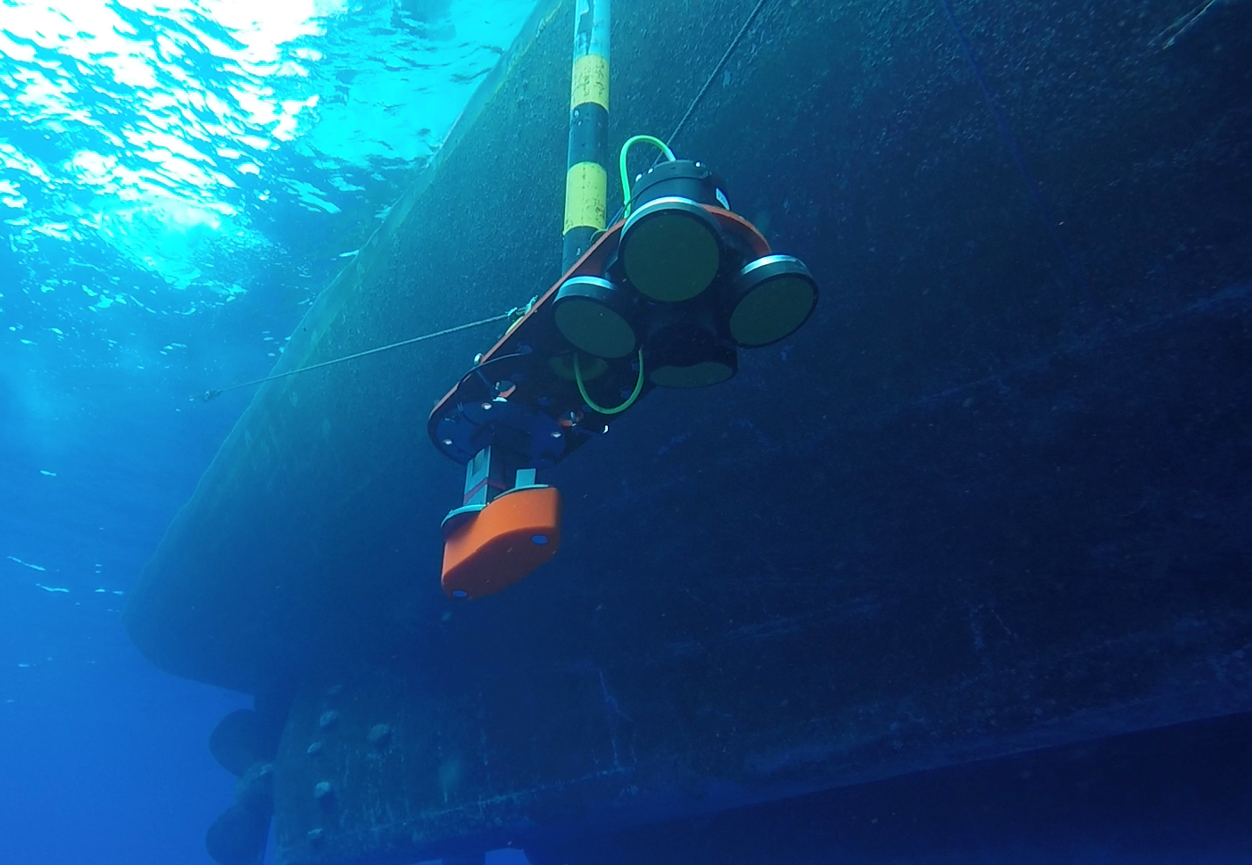
Type of vessel: The vessel used for the ADCP system should be large enough to provide a stable platform in the conditions where it will be used. An unstable ship will result in reduced data accuracy. At sea, a survey vessel specifically designed to perform ocean measurements is best. On the other hand, on a river, a small, maneuverable vessel is needed. Additionally, Uncrewed Surface Vehicles (USVs) are an increasingly popular tool for data collection, including current surveys. On smaller and less stable platforms like these, correcting for quick changes in pitch, roll and heading is especially important. Tight time integration between the ADCP and the auxiliary sensors providing this information is a significant contributor to good data quality.
Maneuvering: The boat needs to be maneuvered properly. Making sharp turns and increasing speed too quickly will be detrimental to data quality. Those operating the vessel should be calm, in control and go with the flow.
Orientation: A global navigation satellite system (GNSS), such as GPS, an electronic compass and a pitch and roll sensor are all crucial sensors to provide information on vessel location and instrument orientation. This enables a vessel velocity backup in case of the loss of bottom track, and provides the detailed pitch, roll and heading information necessary for the correction of vessel motion. Many vessels have some of these systems on board already.
Speed of sound: Sound travels at different speeds through water depending on the water’s temperature and salinity. You need to know the speed of sound in the water and the depth of the sensor to ensure the ADCP velocity measurements and their locations in the water column are accurate. Measurements of temperature and sensor depth can be taken by the ADCP, but salinity values will need to be input to the system for an accurate speed of sound estimate. Alternatively, if you know the speed of sound near the ADCP, you may input that value into the system directly.
Accurate time-keeping: Accurate timing of measurements is essential. You must know what the time lag is between the ADCP and any auxiliary sensors such as the GNSS – modern systems can close the gap to milliseconds or even less. As mentioned above, being able to time-sync ADCP and auxiliary sensor measurements is crucial for correction for vessel motion.

2. Applications benefiting from vessel-mounted current measurement
Nortek’s three vessel-mounted systems (VM Coastal, VM Ocean and VM Operations) are designed with common uses of vessel-mounted ADCPs in mind.
The VM Coastal system is designed for shallower-water surveys covering a variety of projects. For example, these measurements can be used for calculating river discharge, as users can collect both current speed and direction across the river as well as depth using the system. Alternatively, many users choose an ADCP with an echosounder in order to perform studies investigating suspended sediments and sediment transport.
These in-situ shallow-water current measurements are often used to create models of currents over a larger area. This is beneficial in many areas, including in high-boat-traffic areas or in ports and harbors.
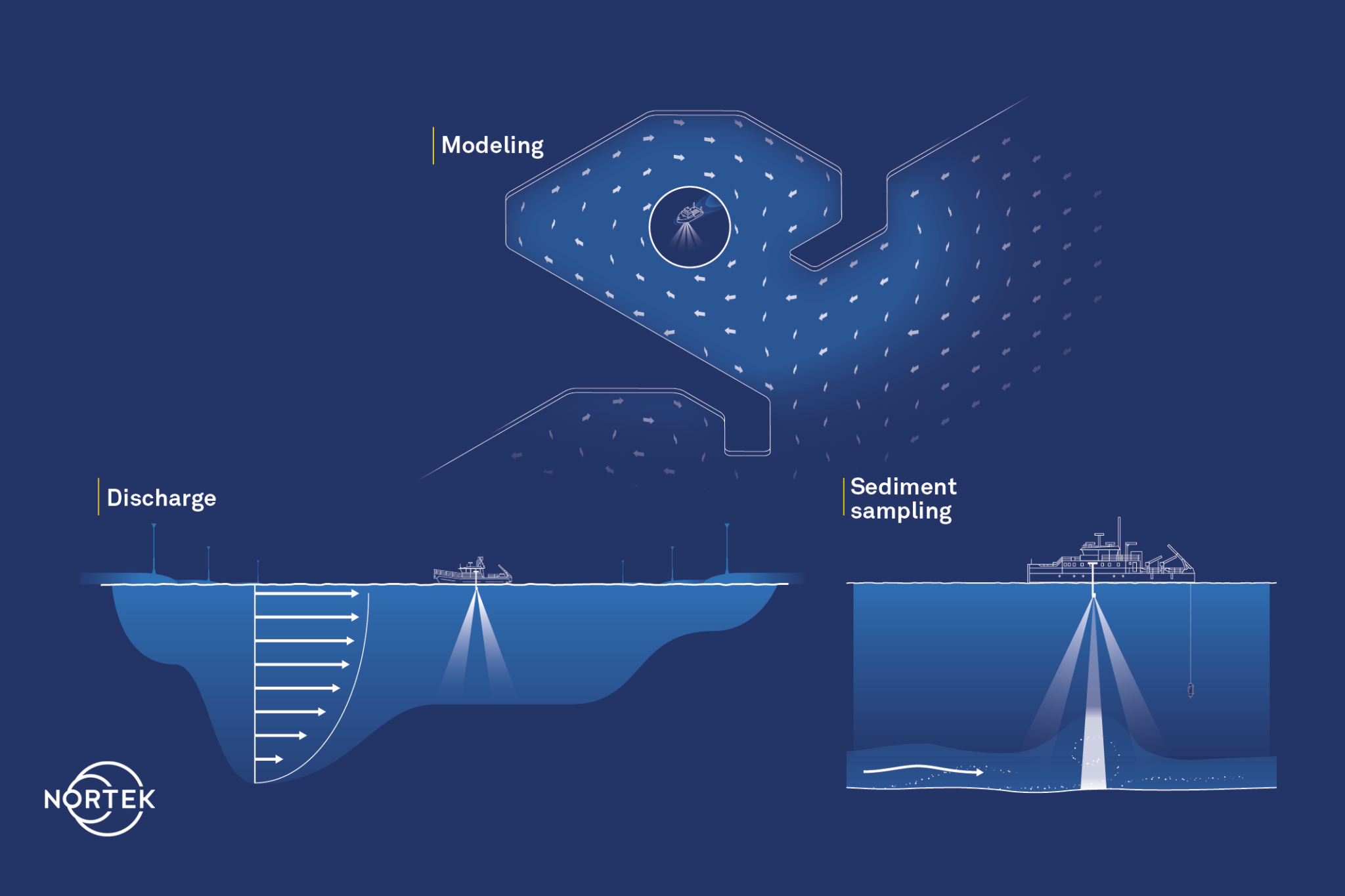
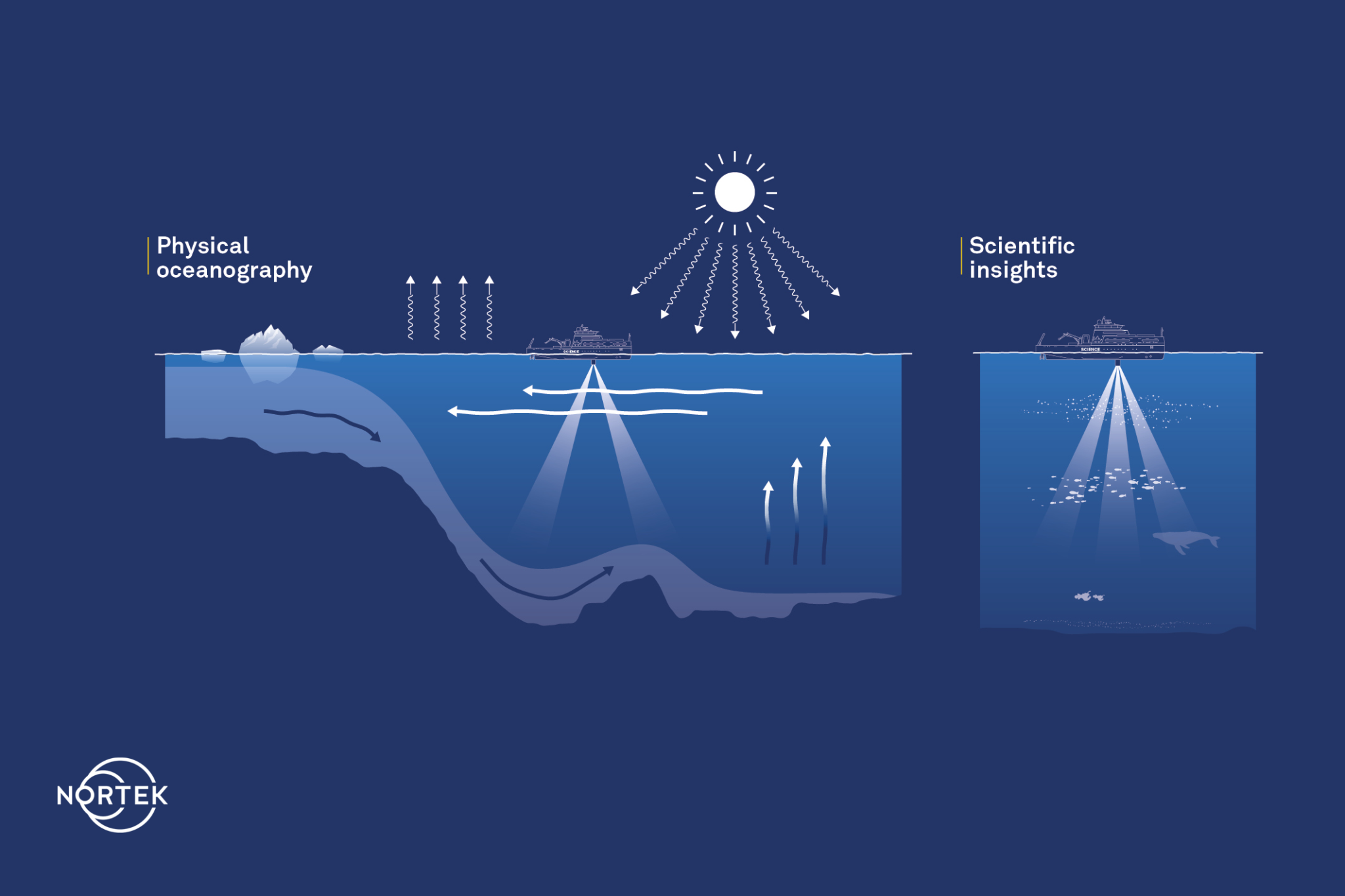
Vessel-mounted systems are also used in intermediate or deep waters (Nortek’s VM Ocean is appropriate for these depths). Physical oceanography studies often use a vessel-mounted system to gather information on multiple parameters over a larger area during the study. Researchers may be investigating ocean discharge, looking for insights into krill, zooplankton or fish, or trying to detect internal waves.
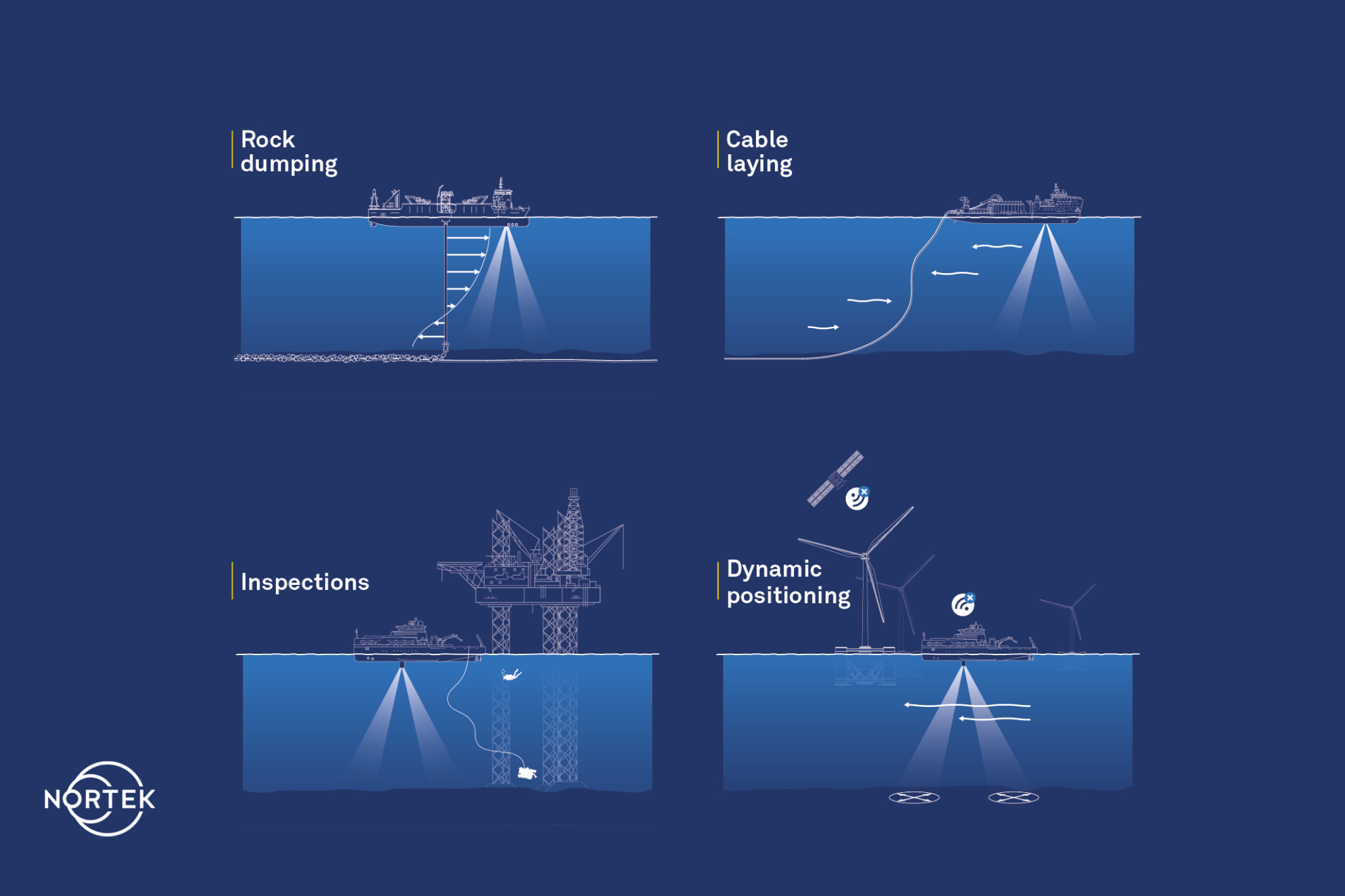
Offshore operations crews also rely on real-time current information to get jobs done safely and efficiently; this is where Nortek’s VM Operations comes in.
Installation projects like rock dumping or cable laying, inspections of offshore infrastructure, and dynamic positioning of a vessel during operation are all examples of operations which benefit from this real-time current information.
3. Processing and interpreting data from vessel-mounted ADCPs
In the past, current profiling required a specialist to process and interpret data from the instrument. Now, an integrated suite of products enables users of all skill and experience levels to operate the system and access the data on board, saving time and money.
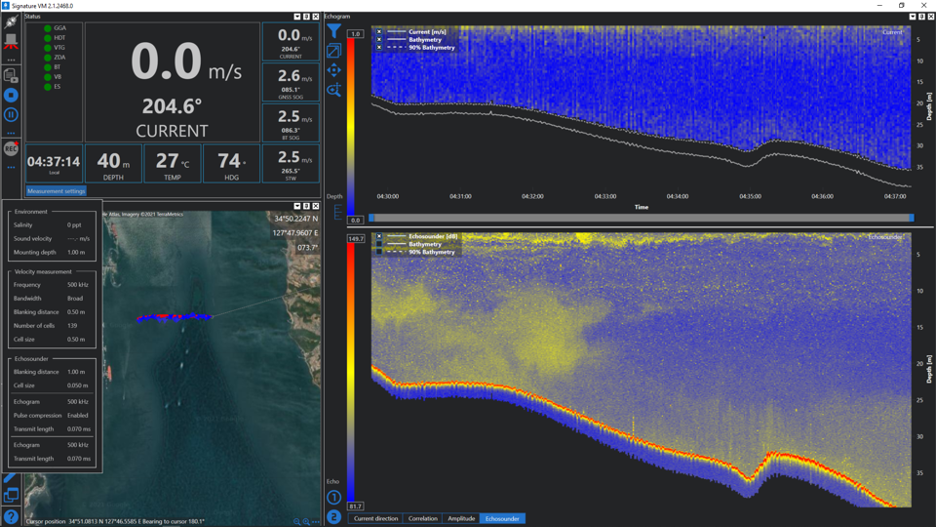
In the case of Nortek VM systems, Nortek’s data acquisition software allows users to view data in real time while onboard the vessel, as well as store data and report on the functioning of the entire system.
The acquired data can then be fed into the post-processing VM Review software. VM Review allows the user to select and analyze specific data of interest, improve or correct sensor alignment, and apply any necessary filtering on the data.
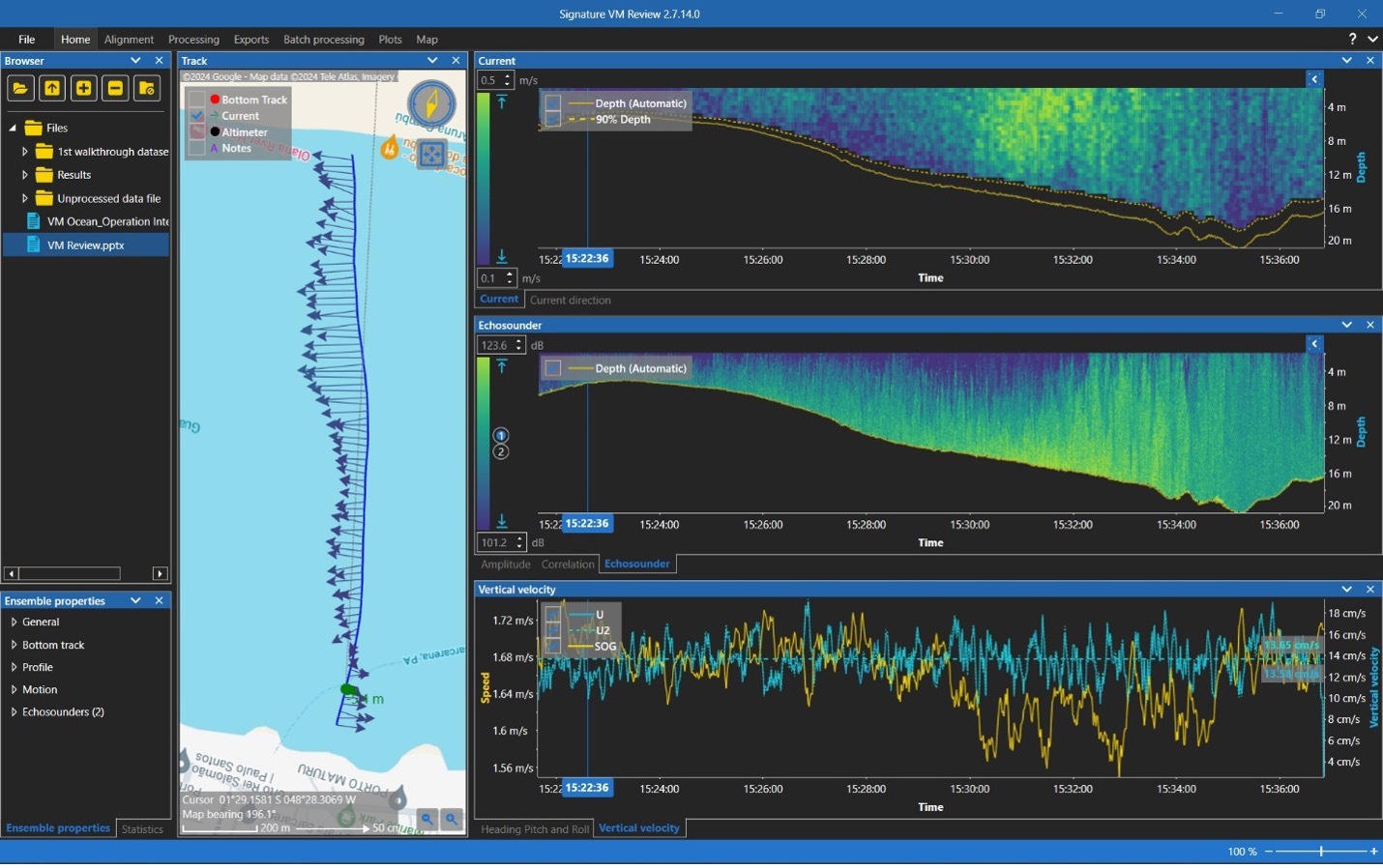
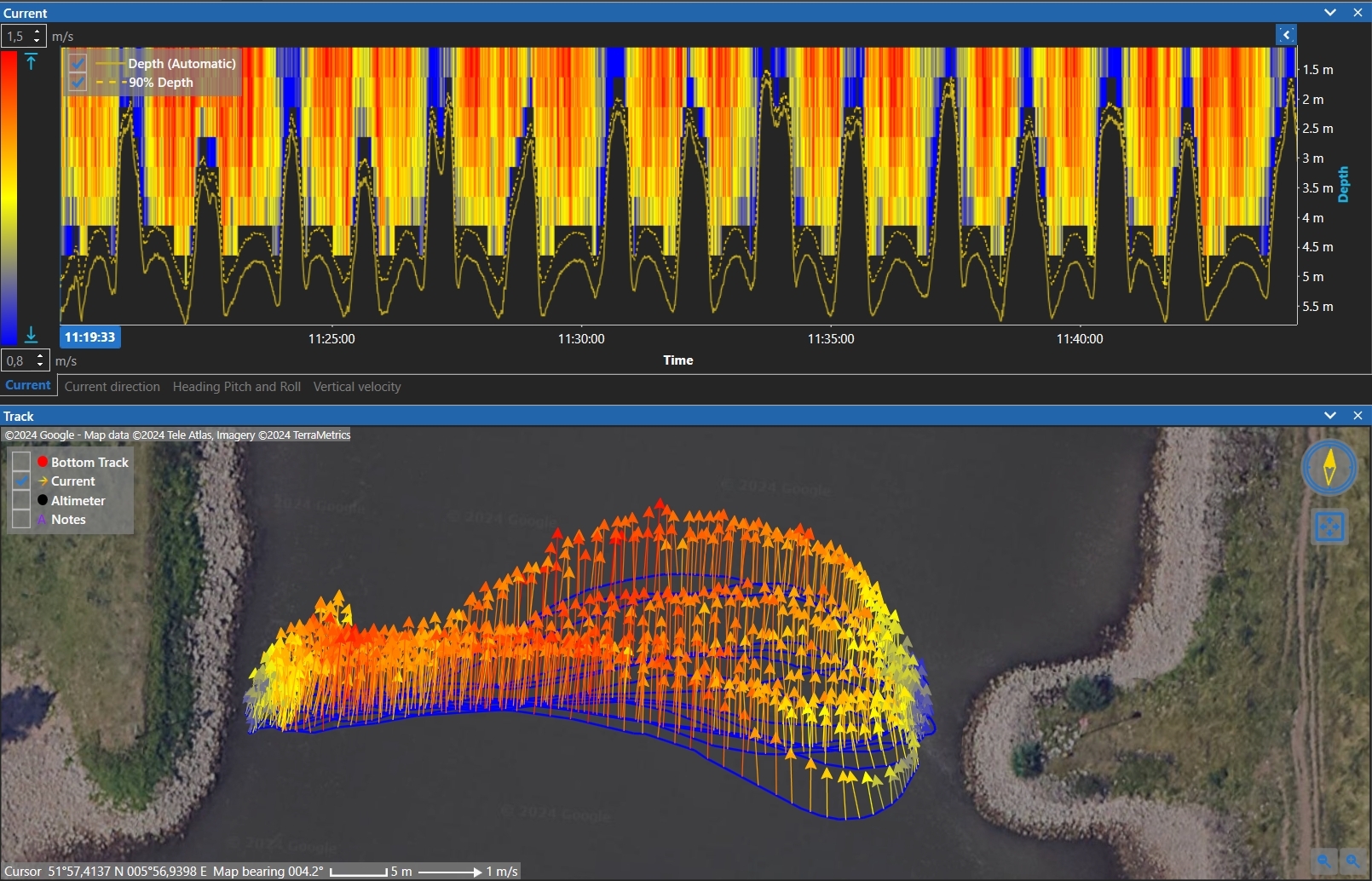
The user can visualize the ship track including average current velocities (the arrows along the track represent the currents averaged from the seabed to the surface), echograms, profiles of current speed and direction, and quality parameters such as signal strength, correlation and tilt. The raw or processed data can be exported as pictures or stored in other file formats, such as CSV, Matlab, VMT and Qrev formats.
The ability to export to Matlab and VMT is particularly useful for scientist or consultants that require the data for further investigation or to create and calibrate models such as tidal models. Qrev is a tool used by hydrologists to calculate their discharge data accurately. It is freely available and ensures consistent algorithms are applied for the computation of discharge, independent of the ADCP manufacturer. It also provides automated data filters, graphs and tables, and user feedback for all data to improve consistency of data quality assessments.

Operational users, using the VM Operations acquisitions software, typically do not depend on post-processing software and are instead interested in real-time data for direct subsea situational awareness to allow decision making. Watch this video to see what the VM Operations software can do.
4. What’s next for vessel-mounted current measurement?
The potential to use unmanned vessels, or even autonomous vehicles, offers the possibility of lower-cost measurements and the opportunity to harvest even more data. Nortek offers a tailored VM system with INS compatible bottom track output which can be used on USVs, saving payload on small vehicles.
Improvements in data processing techniques should make analysis easier and further improve data quality. Ever-increasing computer power should allow more tasks that once had to be done on shore to be carried out on the vessel.
Measuring currents from vessels using acoustic Doppler equipment is highly accurate, much easier to do than days past, and can be a very valuable tool for many different applications.