Autonomous docking of resident subsea vehicles using Nortek DVLs
- User stories
Synopsis
Challenge
The ability to operate AUVs and ROVs as "resident" platforms (meaning they remain submerged for many months at a time) autonomously is challenging, due to environmental and operational challenges restricting the effectiveness of navigation sensors.
Solution
Offshore survey contractor Modus Subsea Services Ltd used Nortek DVLs to maintain navigational consistency while testing and proving resident vehicle capabilities.
Benefit
Successful operation of resident platforms has benefits ranging from reduced costs to reduced carbon emissions.
Enabling subsea vehicles such as AUVs and ROV to operate as “resident” platforms has been a goal of the offshore energy market for several years. In reality, performing truly autonomous operations is extremely complex, partly owing to environmental and operational challenges restricting the effectiveness of the navigation sensors of such vehicles.
Demonstrating that autonomous docking works in real-world operational conditions is crucial in order to demonstrate the value and capability of subsea robotic vehicles. Such real-world demonstrations may show that a vehicle is able to return safely to a subsea docking station for battery charging and data download, ultimately delivering information from activities such as asset integrity surveys.
A DVL able to maintain bottom lock for resident autonomous subsea vehicles in challenging conditions
Nortek’s DVLs are known for their ability to maintain bottom lock across such challenging conditions, including extremely near to boundaries, and over acoustically complex surfaces. Leading offshore survey contractor Modus chose to use Nortek’s DVL to help maintain navigational consistency while proving resident autonomous vehicles’ capabilities.
Modus provides a full range of survey, inspection and subsea intervention services utilizing both autonomous and traditional platforms such as Hovering Autonomous Underwater Vehicles (HAUVs), ROVs and Trenchers.
By combining a history of innovation, operational expertise and disruptive technology, Modus is providing low-carbon digital solutions to improve sustainability, safety and decision-making in the subsea OPEX sector and is a world leader in the deployment of HAUVs.

Successfully testing autonomous docking for autonomous subsea vehicles (HAUV)
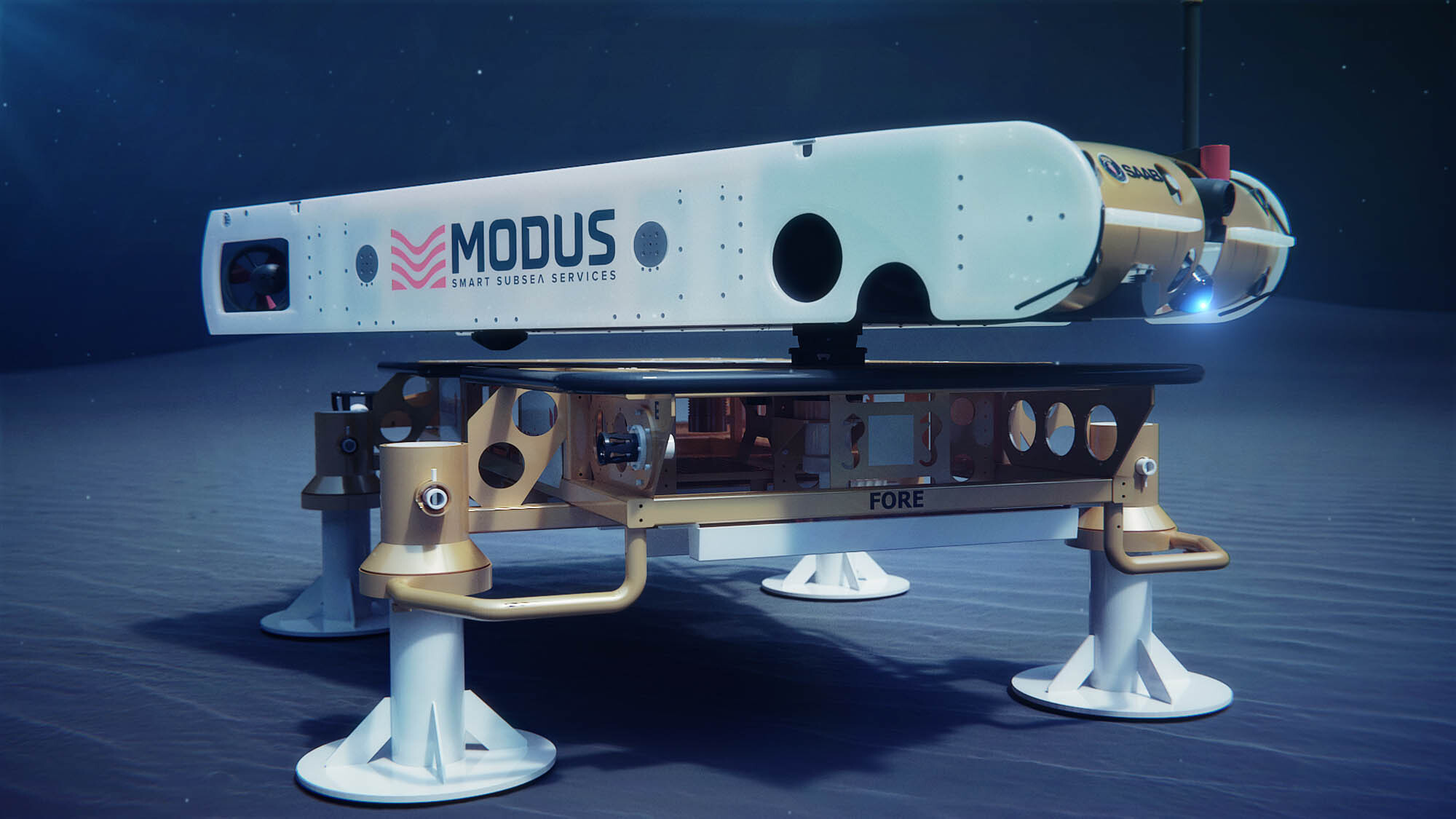
In a world first, Modus completed the successful autonomous docking of a Saab Sabertooth HAUV (one of its fleet of two of these vehicles) to an Equinor/BlueLogic Subsea Docking Station (SDS) as part of an Equinor-funded test scope in the northeast of England in November 2021.
This involved the HAUV leaving the SDS, performing a pre-planned demonstration survey mission, navigating back to the SDS, then autonomously docking precisely to allow for data and power transfer – all without manual intervention.
The margins for error in this application are exceptionally small, requiring that all navigation sensors are operating at their best – be they visual, inertial or acoustic. Critical to this is the role of an autonomous vehicle’s Doppler Velocity Log, or DVL.
“The performance of the DVL is important for our operations since it helps us achieve the resident capabilities within the SDS structures proposed by Equinor/BlueLogic,” says Philip Strettle-Brown, Autonomy Program Manager at Modus Ltd.
However, due to the unique conditions of this trial, the vehicle’s existing Doppler Velocity Log (DVL) was presented with two operational hurdles:
- a sudden change in altitude as the HAUV passed over the platform edge
- difficulty maintaining bottom lock over the grating on the platform superstructure
Loss of bottom lock due to these factors resulted in poor DVL to INS aiding, causing drift in the Sabertooth’s inertial navigation system. The impact of this was to make autonomous docking more challenging – something that cannot be afforded in such applications.
“Owing to the high tolerance of the Equinor OS SDS connector, a high navigational accuracy is required to enable the vehicle’s power and comms connector to mate with the docking connector,” adds Strettle-Brown.

A DVL with consistent bottom lock for resident, autonomous subsea vehicles
To better understand the improvements offered by DVL to INS aiding, Modus tested the navigation performance around the docking platform. The Nortek DVL dropped into the previous DVL mounting position, and interfaced directly with the on-board INS.
Soon after testing began, it became clear that the performance of the DVL allowed the HAUV to perform much more reliable docking by maintaining consistent bottom lock, both over the metal grille and also down to very low altitudes (< 30 cm).
“Due to the structure design, the original DVL was unable to hold a stable position, resulting in vehicle drift. The Nortek DVL overcame this problem,” says Philip Strettle-Brown.
The end result of maintaining consistent bottom lock was that the velocity readings being fed from the DVL to INS were reliable, with lower variance than alternative solutions. In turn, the on-board INS did not accumulate as much free inertial drift error, ensuring positioning was kept precise enough to allow repeatable docking, free from human intervention.
“The Nortek DVL was able to aid the INS during difficult conditions in the trials. During testing we had a mockup of the subsea docking station installed on the seabed where the HAUV was simulating the docking position as would be encountered in the offshore environment,” Strettle-Brown explains.
Preparing for the future of resident subsea vehicle operations with Nortek DVLs
Encouraged by the success of these trials, Modus decided to invest in its first Nortek DVL system. Opting for the recently released DVL 500 Compact will allow Modus to maintain both near-bed and high-altitude bottom lock up to 175 m above bed.
“We chose Nortek’s DVL to meet the challenges we had faced due to the physical size and the improved bottom lock range of this DVL,” Strettle-Brown adds.
Given the challenging nature of this application (including a focus on repeatability), Modus are also testing a new firmware from Nortek that reduces the minimum bottom tracking range to 10 cm, giving it the best minimum altitude for a survey-grade DVL on the market.
Strettle-Brown outlines what is next on the horizon for subsea autonomy and remote operations:
“We are aiming at full resident trials later this year, showing off the full capability of the Modus HAUV fleet of subsea vehicles,” he concludes.
Read more in Ocean Robotics Planet: "Modus Subsea Services awarded the world’s first resident subsea drone contract by Equinor Energy"
“The performance of the DVL is important for our operations since it helps us achieve the resident capabilities within the SDS structures proposed by Equinor/BlueLogic,” says Philip Strettle-Brown, Autonomy Program Manager at Modus Ltd.